| PIP Programmable Floor Robot |
|
This was part of one of the first acquisitions of the archive and
obtained from a retiring primary school teacher. When received it
was not working. The battery was flat and would not charge. PIP is powered by a sealed 12v 800mAH lead-acid battery. Thankfully this type of battery did not leak as did the contemporary NiCd types. A replacement battery was obtained and the robot then worked perfectly. The robot contains its own processor to act on the program instructions and control the two stepper-motors, which provide traction. Traction is quite powerful on a smooth surface. Programs can be large - up to 1K in length. Stored programs may be uploaded to a BBC microcomputer through the User Port using a machine code program, originally written in FORTH and then compiled. Swallow Systems, the makers, is still active even though PIP is obsolete. When contacted they were very helpful but unfortunately they had long-since discarded their source code for the software. Nevertheless the structure of the file used for saving PIP programs was reverse-engineered and the opcodes used were determined.
|
|
OUTSIDE The following pictures show the appearance of the PIP robot.
|
|
The top view of the PIP in its box showing PIP, the charger and a pen attachment
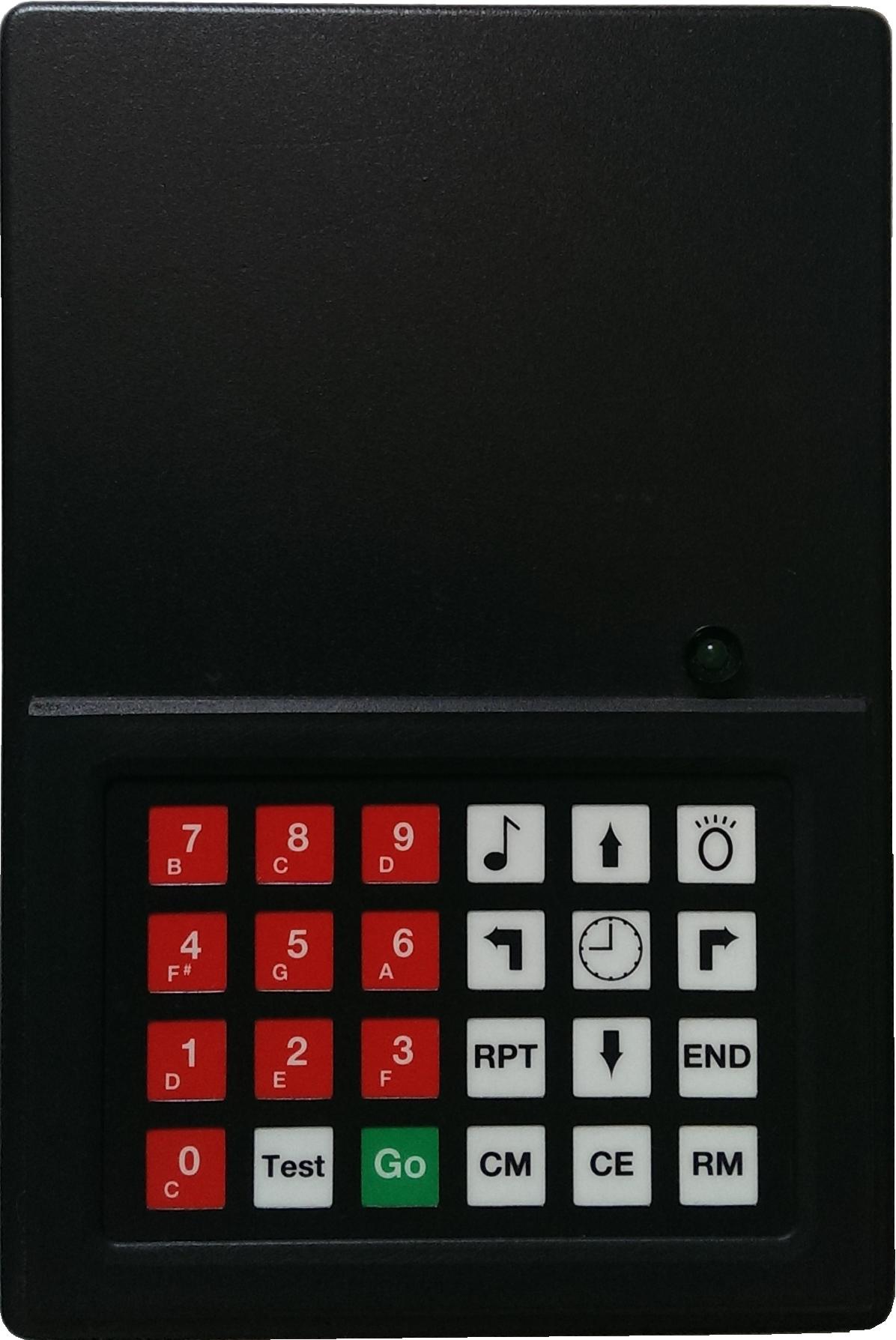
PIP from the top showing the programming/control keypad
The label on the underside showing the motor wheels, stabilisers and the serial number.
A spare battery for PIP
|
|
SOFTWARE The software for PIP came on a third party 40T floppy disk. The software was obtained from two sources, one a retiring teacher and the other from the Riverside Teacher's Centre in central Scotland. Both examples contained the same code. The original software supplied with PIP did not allow easy editing of a PIP program. The Archive has reverse-engineered the PIP program file structure and the tokens used by a PIP program and produced a more completed PIP experience for the user. The new PIP system disk can be found here. The PIP program editor documentation and key strip can also be downloaded.
|
|
COMMUNICATION WITH PIP PIP communicates with the BBC microcomputer via a serial interface running from the User Port. The baud rate used is unknown as is the communication protocol. At the PIP end is a 7-pin DIN connection, which is also used to supply power for the charging circuit when the charger is plugged in through pins 6 and 7.
|
| DOCUMENTATION |
|
© 2018 - 2026 flaxcottage.com |